
SHENKAR
GRADUATES
סופשנה
שנקר

Instruction:
Dr. Amit Resh
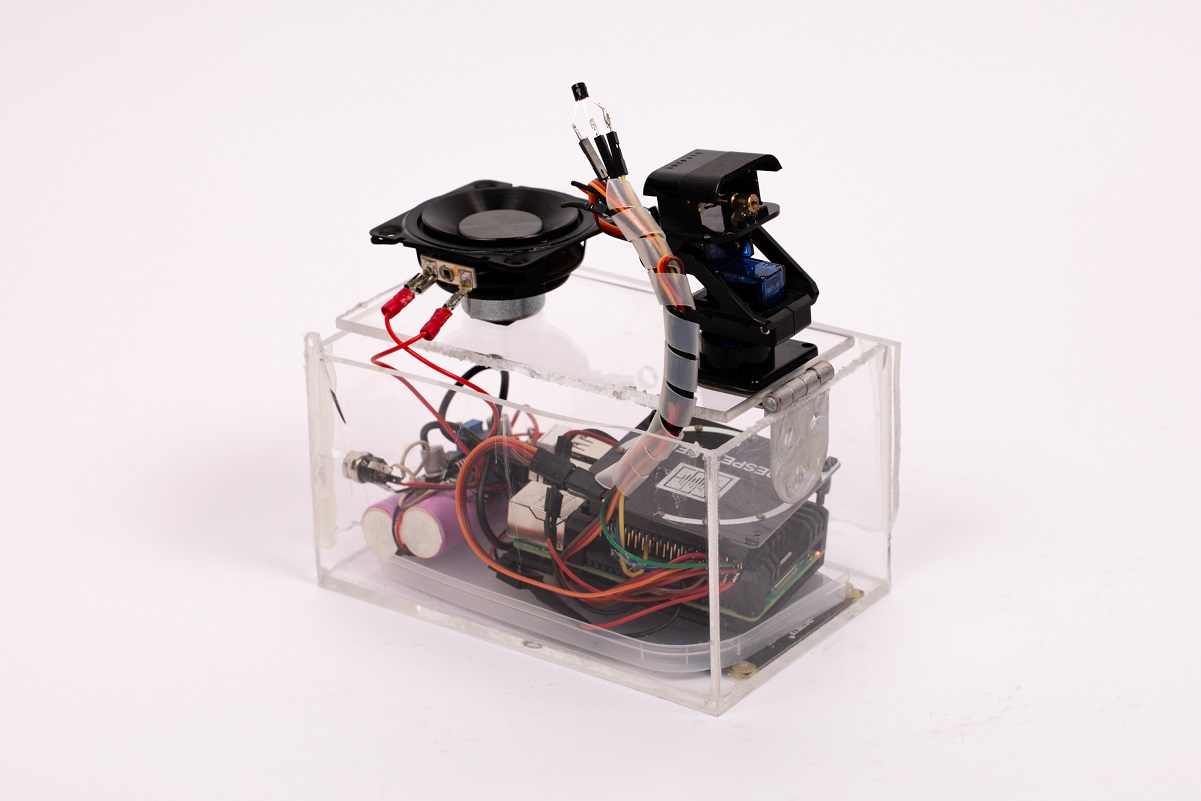
Kay is an interactive, voice-activated assistant robot designed to operate in a specific physical space. Unlike existing voice-activated smart speakers (e.g., Amazon Alexa and Google Home) or on-device virtual assistants (e.g., Siri and Google Assistant), Kay is designed for a specific location. In the case of our prototype, Kay lives in the Kadar Center for Design and Technology at Shenkar. Kay is designed to help visitors (students who come to study and work on their projects) use the center’s services and feel more at ease there.
Kay has several functions: she can search through the center’s library of projects, display individual projects, guide users through their experiences with the prototypes installed at the center, and find equipment for building projects. These functions are spread out through the center. Kay can point to components in the equipment storage area, play project videos on a screen in another corner of the space, and explain how to use a prototype when she is near one.
Kay’s movement through the space was central to the project’s development. Instead of designing the robot to move around independently, we used a Human-Robot Collaboration model, where each party does what’s easy for them. When a user asks Kay to find something, Kay asks the user to move her to where she can easily point at what the user is looking for. This way, Kay accesses the center’s information systems and uses her communication functions—two things she can do with ease—while the human uses their arms and legs to move her where she needs to be.
A second challenge we faced was designing Kay’s look to make her feel like a natural part of the center. Currently, she is made of textile and plastic, and there are several “balconies” for her to occupy around the lab.
The project has two main objectives: (1) to explore the potential value of a voice-activated robot designed for a given space (in this case, a learning environment), and (2) to examine and design a unique human-robot collaboration scenario.
KAY
Aviel Dagan, Itay Gershman